 |
�a(ch��n)Ʒ���a��HBE-RoboEX
�� �� �ʣ� 0
�����£�2014-04-14
�P(gu��n) ע �ȣ�3343
���a(ch��n)��I(y��)���������ӿƼ�������������˾
|
|
|
 �c��I(y��)(li��n)ϵ�rՈ��֪ԓ��Ϣ���Խ����b��W(w��ng)�� �c��I(y��)(li��n)ϵ�rՈ��֪ԓ��Ϣ���Խ����b��W(w��ng)�� |
|
|
�a(ch��n)ƷԔ����B1����ģ�K�����Q��Ҏ(gu��)��
HBE-RoboEX-Main�� �� �� �� �� ģ �K
������CAN���п���ϵ�y(t��ng)�����Ԙ�(g��u)�������O(sh��)��W(w��ng)�j(lu��)֧��
ʹ�õ��_�ŵ�Ӳ��ƽ�_--Arduino�������ƵęC������ϵ�y(t��ng)�е�늙C������
�{��ͨ�Ŝyԇ
RoboEX ϵ��ʹ�ÈD��LCD�M�вˆ�����
�ṩAndroX Studio �����_�l(f��)�h(hu��n)������C����ϵ�y(t��ng)����Ҫ�_�l(f��)�h(hu��n)��
HBE-RoboEX-Motor: ���ܙC����늙C�W(xu��)��(x��)ģ�K
�����Ĵ��п���ϵ�y(t��ng)֧�֣����Ԙ�(g��u)�������O(sh��)��ľW(w��ng)�j(lu��)ϵ�y(t��ng)
ʹ�õ��_�ŵ�Ӳ��ƽ�_-Arduino�������ƙC������ϵ�y(t��ng)�е�늙C������
ͨ�^�t��������M��ֱ��늙C���ƺͲ���
�Ɏ����a����ֱ��늙C�M���D(zhu��n)�Ӳ�������
�ɼ��ٶ�Ӌ�M���ŷ�늙C���ƺͲ���
�� PWM�M�в��M늙C�Ŀ��ƺͲ���
�ṩAndroX Studio �����_�l(f��)�h(hu��n)������C����ϵ�y(t��ng)����Ҫ�_�l(f��)�h(hu��n)��
HBE-RoboEX-ARM�� ���ܙC���˵��ֱ�ģ�K
�����Ĵ��п���ϵ�y(t��ng)֧�֣����Ԙ�(g��u)�������O(sh��)��ľW(w��ng)�j(lu��)ϵ�y(t��ng)
ʹ�õ��_�ŵ�Ӳ��ƽ�_-Arduino�������ƙC������ϵ�y(t��ng)�е�늙C������
�ӑB(t��i)��Ԫ�ŷ�늙C����
Daisy Chain늙C�B�Ӻ�ID��(sh��)��(j��)��ͨ�ſ���
ͨ�^�����������о��|�X
�ɼ��ٶ�Ӌ �����݃x�������M���ŷ�늙C���ƺͲ���
ʹ���c֮�o�����B��RoboEX-3WD�M�����ܙC���˵đ�(y��ng)��
AndroX Studio �����_�l(f��)�h(hu��n)������C����ϵ�y(t��ng)����Ҫ�_�l(f��)�h(hu��n)��
HBE-RoboEX-Brain: �C��������ģ�K
�����Ĵ��п���ϵ�y(t��ng)֧�֣����Ԙ�(g��u)�������O(sh��)��ľW(w��ng)�j(lu��)ϵ�y(t��ng)
ʹ�õ��_�ŵ�Ӳ��ƽ�_-Arduino�������ƙC������ϵ�y(t��ng)�е�늙C������
�ӑB(t��i)��Ԫ�ŷ�늙C����
Daisy Chain늙C�B�Ӻ�ID��(sh��)��(j��)��ͨ�ſ���
��ý�w��(y��ng)�ó���͙C���˿���
���ڈD��̎���đ�(y��ng)�ó����OpenCV
ʹ���c֮�o�����B��RoboEX-3WD�M�����ܙC���˵đ�(y��ng)��
AndroX Studio �����_�l(f��)�h(hu��n)������C����ϵ�y(t��ng)����Ҫ�_�l(f��)�h(hu��n)��
HBE-RoboEX-3WD: ���ܙC���ˈ�(zh��)����ģ�K
�����Ĵ��п���ϵ�y(t��ng)֧�֣����Ԙ�(g��u)�������O(sh��)��ľW(w��ng)�j(lu��)ϵ�y(t��ng)
ʹ�õ��_�ŵ�Ӳ��ƽ�_-Arduino�������ƙC������ϵ�y(t��ng)�е�늙C������
���Ƅӵ� Mecanum ݆ȫ�����ʹ��
��ֱ�����a늙C�M�Ђ�������������
�ɼ��ٶ�Ӌ �������݃x�������M��ֱ���ŷ�늙C���ƺͲ���
AndroX Studio �����_�l(f��)�h(hu��n)������C����ϵ�y(t��ng)����Ҫ�_�l(f��)�h(hu��n)��
HBE-RoboEX-犔[: ���ܙC���˔[����ģ�K
�����Ĵ��п���ϵ�y(t��ng)֧�֣����Ԙ�(g��u)�������O(sh��)��ľW(w��ng)�j(lu��)ϵ�y(t��ng)
ʹ�õ��_�ŵ�Ӳ��ƽ�_-Arduino�������ƙC������ϵ�y(t��ng)�е�늙C������
�����[�� PID ����
�ɾ��a��Ӌ��(sh��)�M��PWMռ�ղ�����늙C����
�����M�����B(t��i)�O(ji��n)�y
AndroX Studio �����_�l(f��)�h(hu��n)������C����ϵ�y(t��ng)����Ҫ�_�l(f��)�h(hu��n)��
2����ģ�K�Ļ�������
HBE-RoboEX-Motor ģ�K���ԌW(xu��)��(x��)��ο���ֱ��늙C���ŷ�늙C�Ͳ��M늙C���C�����O(sh��)Ӌ��
HBE-RoboEX-ARM ģ�K���ԌW(xu��)��(x��)�ӑB(t��i)��Ԫ�ŷ�늙C���Ƽ��g(sh��)���O(sh��)Ӌ�C����ϵ�y(t��ng)�� �ӑB(t��i)��Ԫ�ŷ�늙C�ĄӑB(t��i)��Ԫ���������Լ��� ID���ھW(w��ng)�j(lu��)�У��ɿ����Д�(sh��)��(j��)��ͨ�ſ��ƌ����M�в������ӑB(t��i)��Ԫ�ŷ�늙C��Daisy Chain�B�ӣ����нӾ����κͷ���ĿɔUչ�ԡ�
HBE-RoboEX-Brain ģ�K�ɌW(xu��)��(x��)���ӑB(t��i)��Ԫ���ŷ�늙C���Ƽ��g(sh��)�ͻ��ڈD��̎�����g(sh��)ʹ�õ� OpenCV�졣�O(sh��)��ʹ�û��ڵ�����Exynos 5�Ą�(chu��ng)��(y��ng)�ó���̎������Cortex-M3 32 λ̎�������ɪ���������
HBE-Robo-EX-3WD ģ�K�ɌW(xu��)��(x��)����ȫ��λ�{(di��o)��ȫλ܇݆��ֱ��늙C���M�ЙC�����O(sh��)Ӌ��
HBE-RoboEX-Pendulum �O(sh��)������о���ο���ֱ��늙C�� ���a��Ӌ��(sh��)���� PID �ĵ����[ϵ�y(t��ng)�O(sh��)Ӌ��
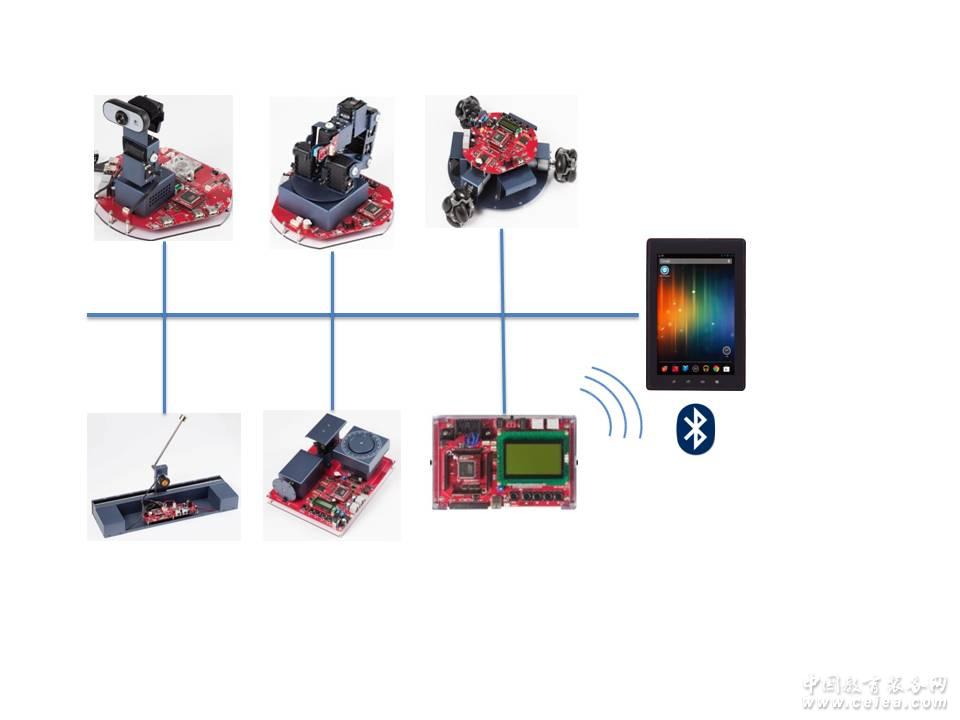
3����ģ�K��ͬ���c
�O(sh��)��ʹ��ģ�K���O(sh��)Ӌ�M�п��к͌W(xu��)��(x��)�����ڂ��ˌW(xu��)��(x��)��ͬ�rҲ���M�к����_�l(f��).
HBE RoboEX ϵ��ʹ��Cortex-M3�� 32 λ̎�������ɪ���������
�O(sh��)��ʹ��CAN����ͨ�Ł혋(g��u)������������ģ�K�g��һ�������ԾW(w��ng)�j(lu��)��ʹ�����еı�Ҫģ�K֮�g�ں���ģʽ�п��������ͨ�š�
CAN ͨ�ź���Դ������һ����|�У����������(li��n)ϵ����ģʽ�\�Еr���ܽ�����Ч�ľW(w��ng)�j(lu��)
�O(sh��)��ʹ�� Arduino�����_����O(sh��)�����ƽ�_�����龎�̭h(hu��n)���У��@�nj��I(y��)Ӳ����������h(hu��n)������ˣ������Ժ���Č��F(xi��n)��ΏĂ������@ȡ�Ġ�B(t��i)��Ϣ�Ϳ���늄әC�IJ������x��
�O(sh��)��֧�ֹȸ�ADK �Ա��о�����늙Cģ�K�IJ����͏������֙C��ƽ����X�бO(ji��n)ҕ������ֵ��
�O(sh��)��֧���{�������� HBE-RoboEX ϵ�еIJ����͏������֙C��ƽ����X�бO(ji��n)�y������ֵ��
4���M��
���õij���� ����ϵ�y(t��ng)ģ�K1����UTP ��| 1�� �Դ�m���� 1�� ƽ�_ CD 1���� AndroX ������ DVD 1���� �Ñ��փ� 1������ USB ��|
HBE-RoboEX-Motor 늙C�W(xu��)��(x��)ģ�K1���� ����փ� 1��
HBE-RoboEX-ARM �C���˱�ģ�K1���� ����փ� 1��
HBE-RoboEX-Brain �C��������ģ�K1���� ����փ� 1��
HBE-Robo-EX-3WD �C���ˈ�(zh��)����ģ�K1���� ����փ� 1��
HBE-RoboEX-Pendulum �[�Nģ�K1���� ����փ� 1��
|
|
| ���T���e�����M���T |
| ����r�g��2013-10-09
|
|

|