 |
�aƷ��̖��robocup�˜ʰ�
�aƷ���a��
�aƷ�r��150000
�� �� �ʣ� 0
�����£�2016-08-05
�P ע �ȣ�2047
���a��I�������˼�C��������˾
|
|
|
 �c��Iϵ�rՈ��֪ԓ��Ϣ���Խ����b��W�� �c��Iϵ�rՈ��֪ԓ��Ϣ���Խ����b��W�� |
|
|
�aƷԔ����B
С�ͽM݆ʽ�C���������ِ��RoboCup�C�����������籭ِ����Ҫ�Ŀ֮һ��ͬ�rҲ�ǙC���˼��g���˹�������Փ�����õČ��ƽ�_��
����Cornell��W��С�ͽM����C�����о�������ߣ��Ⱥ����Ƴɹ��������C���˸�ِ�͌��ƽ�_����һ���aƷʹ����ȫ�Լs������݆ȫ��λ�ӵ����ߙC�������OӋ�������Ŀ����㷨������݆ȫ��λ�әC���˵���Փ�о��͌��û��춨�˻��A���ڶ���ƽ�_�t�_ʼʹ���^��ԭʼ����݆ȫ��λ�\�әC�������и�����\���ٶȺͼ��ٶȣ����ڙC���˵ĵӿ����㷨�͛Q��ϵ�y�ļܘ����M�����^��������о����������C����ƽ�_�M���˷ֲ�ʽ�Q�ߵćLԇ��Ӌ��C�єz���^�ɼ����Ĉ�����Ϣ���^����̎����l�o�C���ˣ��@�Nģʽ��ֲ�ʽ�������w�����~�M��һ���������@�N�����OӋ���ѣ���K�ڱ�ِ�͌��H�����Л]�аl�]���A�ڵ�Ч����
�������Ȼ�÷¡��WҲ��С�ͽM����C�����I���M�����^����о������Ȼ�÷¡��CMDragonsƽ�_��Corenll��W�о��ɹ��Ļ��A���OӋ���^�����ƵěQ��ϵ�y�������˛Q��ϵ�y�����w�ܘ��Լ��C���˲��ԡ���ɫ���䡢·��Ҏ���͵ӿ��Ƶ��㷨��ͬ�r�ڙC��ҕ�X�ĸ��M���M���˴�����̽�����^�õ؝M���˙C���������ِ��ҕ�X��λϵ�y��Ҫ��Ȼ����CMU�^����f�ęCе�Y��������������ԓ�C����ƽ�_���ܵİl�]��
̩���r�I��W��С�ͽM�C�����I��ĺ���֮�㣬̩���r�I��W��Skuba�C����ƽ�_ʹ�ú��ζ��ֽY�����ęCе�C����˙C���˙C�������{�辫�ʵĵӿ��ƺ�����đ��g����ڸ�ِ�����^�õı��F��Skubaƽ�_�^�кͰlչ�˿��Ȼ�÷¡��W��ҕ�Xϵ�y���ڶ�λ���Ⱥ�푑��r�g�϶������^�����ߡ�
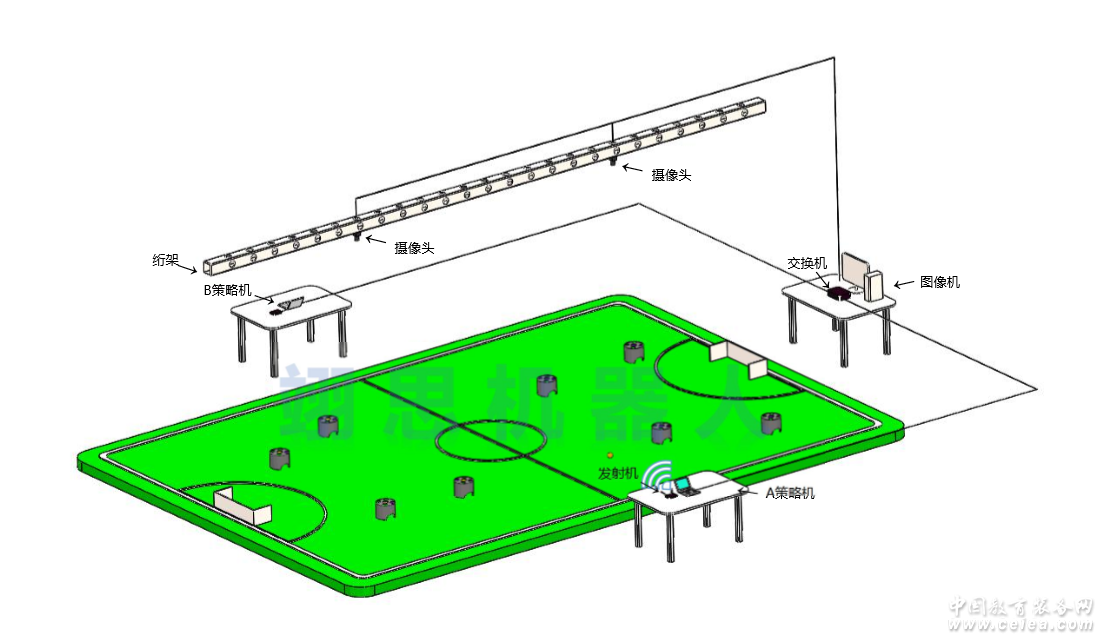
�˼�C�������a��С������C����ϵ�y�Mһ��������ǰĘ�cꇡ�����ɫ�ˡ��{������ϵ�y��������С�ͽM����C���˸�ِ�Ę˜�ƽ�_�ƏV���ã�Ҳ�������鹦�����ĸ�ِϵ�yֱ�Ӆ��әC���������ِ��߀���ڴ˻��A���_չ�C���˼��g����о�����C���˼��g���㷨����ģ���ṩ�����ƽ�_��
ԓϵ�yƽ�_�ęC���������ِ�͌���о��Č��H������l����������݆���ηֲ��ęC�����\�Ә������F�˙C���˵Ķ����ɶ�ȫ���Ƅӣ����OӋ�˿�����șCе�C����ᘌ��\�әC�������c�о��˙C���˵��\�ӿ����㷨���OӋ����ARM��FPGA����ĵęC���˵ĵӿ���ϵ�y�������˷����ɿ��ęC������ϵ�y�����ڻ�׃У����Ŀ�˷ָ�D���R�e�ȈD��̎�������_�l���m���ڌ���҈��صęC��ҕ�Xϵ�y�������˙C���������Q��ϵ�y�����C�����О��M���A�y�Дࡢ�ṩ�Q�ߎ�֧�֡����F�ӑB�h���µ�ȫ��·��Ҏ�����OӋ��2.4G���lͨ��ģ�K������ԓƽ�_�ğo��ͨ��ϵ�y�����F�C������ϵ�y�c�όӛQ�߿���ϵ�y֮�g����Ϣ���Q�����⣬��ϵ�yƽ�_߀ʹ�á�ƽ�_/�����ܛ���wϵ������RoboCupС�ͽM����C���˵��_��ʽ����ϵ�y�� |
|
| ���T���e�����M���T |
| ����r�g��2016-08-05
|
|

|