 |
Ӌ����λ���_
�� �� �ʣ� 0
�����£�2014-01-06
�P ע �ȣ�2924
���a��I��������Ԫ�r���Ƽ�����˾
|
|
|
 �c��Iϵ�rՈ��֪ԓ��Ϣ���Խ����b��W�� �c��Iϵ�rՈ��֪ԓ��Ϣ���Խ����b��W�� |
|
|
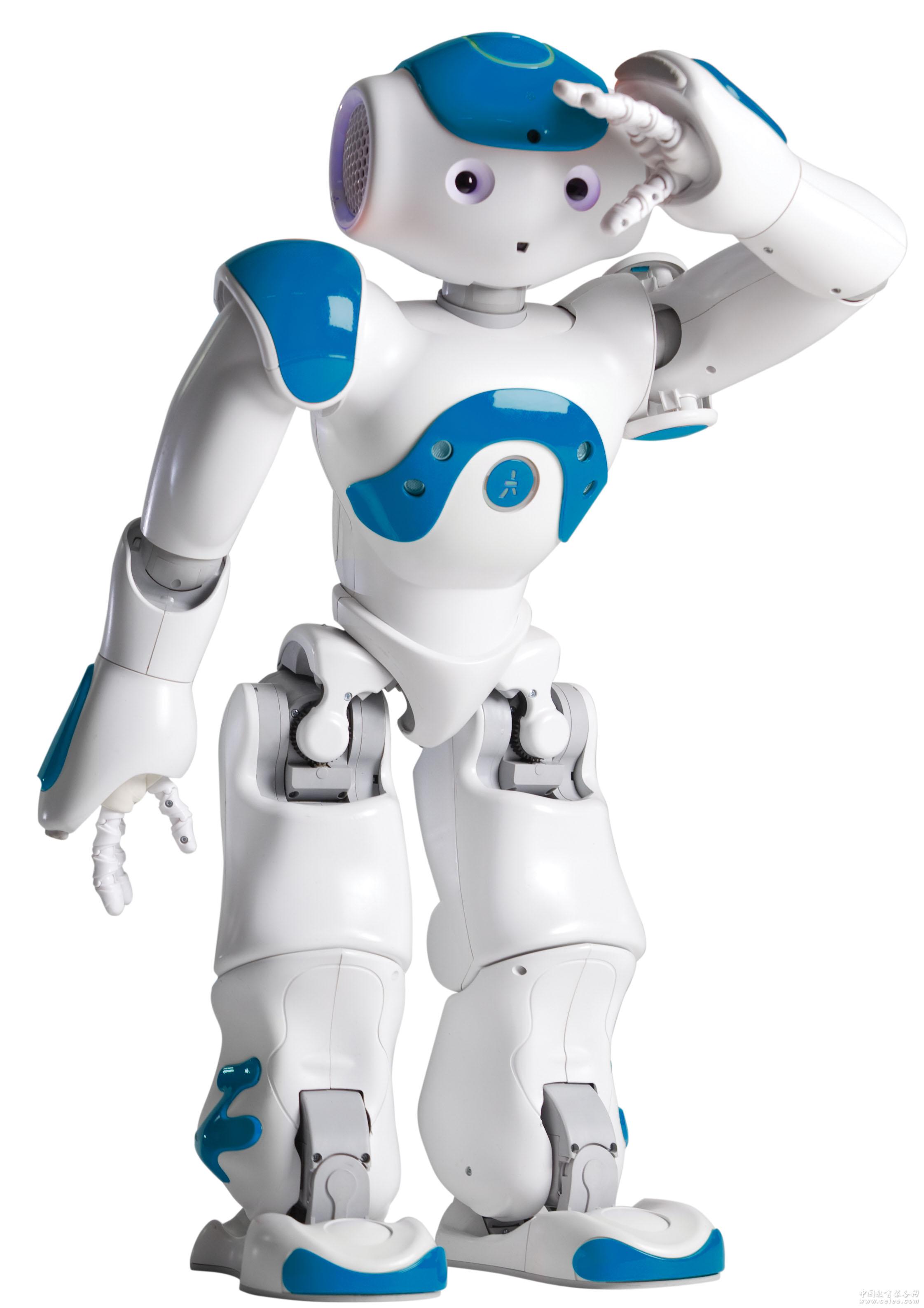
�aƷԔ����BNAO��һ��57���ߵĿɾ��̷��˙C���ˡ����P�I�M�����£�
• ����25�����ɶȣ�DOF�������w�����P�I������늙C�c������
• һϵ�Ђ�������2������z���^��4�������L���ɽM�������x��������2���t�⾀�l�����ͽ�������1�M�T�Ԃ��І�Ԫ���ɂ����݃x��һ������Ӌ����9���|�X��������8��������������
• �������ұ��_���������Z���ϳ�����LED����2����Ʒ�|�P����
• һ��CPU��ATOM Z530����1.6G���l��1G RAM��2Gflash��8Gmicro SDHC��
• �ڶ���CPU��ARM 9��������̎�����Ђ�����������
• һ��1.28Ah늳أ� ����ʹ�÷�ʽ�IJ�ͬ���ɞ�NAO�ṩ1.5С�r���������L�������r�g��
�����C���˵đ��ó�����������ԣ�
���ó������ڴ������M�ď��s���g֮�ϣ����Z���R�e�����w�R�e���؈D�����ȡ�
���ó����횰�ȫ�ɿ��������܉����������YԴ�������ĭh�����\�С�
NAO֧���Ñ�����Windows��Mac��Linuxϵ�y���_�l���a����ͨ�^C++��Python��Urbi��.Net�ȶ�N�Z���M���{�á�������ԓ���֮�ϵ�ģ�K�ṩ�S����API�ӿڣ��Ա��cNAO���ӡ�
�ɝM��һ��C�����_�l����Ҫ�����У��YԴ��ͬ�����¼���
�\��
ȫ��λ����
NAO����ʹ�õ���һ�����΄ӑBģ�ͣ����Ե��[��LIPM��������Ҏ�� ��Quadratic programming����NAOʹ���P���������ṩ�ķ�����Ϣ�����������ƽ�⡣�@�ӣ��ȿ���ߙC�������ߵ������ԣ�����С�ĸɔ_��Ҳ�������|����ǰ�� �͂������ʎ�����⣬NAO߀���ڶ�N���������ߣ����̺���ɴu�ء�ľ�|�ذ�ȣ����ɏ�һ�N�����������������һ�N���档
ȫ���\��
NAO���\��ģ�ͻ���һ���ձ�����\�ӌW��Generalized Inverse Kinematics������̎���ѿ������P�����ơ�ƽ�⡢������΄Ճ��ȼ��ȡ��Q��֮����Ҫ��NAO����ֱەr������ͬ�r�����|�ɡ��@����������ֱۺ��� ���P���������]�ڃȡ�����NAO��ֹͣ�Ƅӣ��Ա���ƽ�⡣
ˤ��������
ˤ����������Fall Manager�����ڙC����ˤ���r���o���á�������Ҫ��������̽�y�C���˵����ģ�CoM���Ƿ�֧�ֶ�߅�εķ�����ԓ֧�ֶ�߅�θ������|������p���λ�Á��_������ˤ��������̽�y���C����Ҫˤ���r�����е��\���΄ն������Kֹ���C���˵��p�ە�������r̎�����ұ��o��λ�ã����ҙC�������Ľ��ͣ�늙C�Ą���Ҳ�������㡣
ҕ�X
NAO���Ѓɂ��z���^�����Ը�ۙ���W�����R�e��ͬ�ĈD����沿��
NAO ���Ãɂ�����z���^����Ч�����_1.22MP��ÿ��30��.����һ���z���^λ�ڙC����ǰ�~���Ĕz��ǰ����ˮƽ���档��һ��λ���첿�����ڒ����܇��h����
ͨ�^ҕ�Xܛ���������٬FNAO�����ĈDƬ��ҕ�l����Ȼ��������˟o����֪�������܇��ĭh���������۾��ܿ�����������ʲô���أ�
���dz����@��ԭ��NAO���ϰ�����һϵ���㷨������̽�y���R�e��ͬ���沿�����w�Π�@�ӣ��C���˾Ϳ����J�������fԒ���ˡ��ҵ�һ��Ƥ����Ǹ�����s�����w��
�@Щ�㷨����NAO���T�_�l�����ң��҂����_�l�^���У�ʼ�K������̎�����YԴ��ʹ���ʽ�����͡�
���⣬ͨ�^NAO��SDK�����������_�lģ�K�������B����OpenCV��OpenCV����Ӣ�ؠ���˾�����_�l���_ԴӋ��Cҕ�X�죩��
��������NAO�ψ���ģ�K�����nj�ģ�K�������c�C�����B�ӵ���X�ϡ��@�ӣ����Ϳ����p�ɵ�ʹ��OpenCV���@ʾ���ܣ����_�l�͜yԇ�����OӋ���㷨�����ɫ@�ÈDƬ������
���l
NAO�����Ă������L���ɸ�ۙԴ��߀��ʹ���߷N�Z���M���Z���R�e�����ϳɡ�
Դ��λ
�C�����c����������Ʒ��˙C���˵���ҪĿ��֮һ��Դ��λ�������ڴ_������Ժη��������������������õ�ݔ��������ͬ�r�M��CPU�̓ȴ淽���Ҫ��NAO��Դ��λ���ܻ��ڡ����_�r�g�����Time Difference of Arrival����
�Q��֮����NAO������ij��Դ�l�����r��NAO���ϵ��Ă������L�ڽ������ĕr�g�ϕ����в�����磬��������NAO����fԒ�r����������̖�����ȵ��_�C������ȵ������L������֮���_λ��ǰ�~�c�X��������L������_�҂ȵ������L��
�@�N�r�g�����顰�p���r�g���interaural time differences�����QITD�������@Щ�r�g��Ļ��A�ϣ�ͨ�^���W�\��ɫ@��Դ�Į�ǰλ�á�
�@�ӣ�ÿ�� ��һ�����r���C���˾Ϳɽ���4�������L�y������ITDֵ��ͨ�^�\��z����Դ�ķ���λ�Ǻ����ǣ���
ԓ��������һ��NAOqiģ�K���Ñ�ʹ�á�ģ�K���顰ALAudioSourceLocalization�����ṩһ��C++��Python��API�ӿڣ��ɜʴ_���cijһPython�_����NAOģ�K���ӡ�
Choregraphe��Ҳ�����ɂ����Pָ��У������Ñ���ijһ�О���ʹ��ԓ���ܣ�
���еČ��H���ð�����
• ̽�y����ۙ���R�eij����
• ̽�y����ۙ���R�eij���ɰl���w
• ��ijһ�ض�������Z���R�e
• ��ijһ�ض�������fԒ���R�e
• �h�̰�ȫ�O��
• �ʘ�
���l��̖̎��
���ڙC�����ϵ�Ƕ��ʽ̎����Ӌ���������ޣ��Еr�Ɍ�ijЩ�\�㌧�����h����������������ɡ�
�@�����������m����̎�����l��̖�����磬��һ���h��̎�������M���Z���R�e�r��Ч�ʕ����ߣ��ٶȸ����Ҹ��ʴ_�����֬F�������֙C�������h�̷�ʽ��̎���Z���R�e��
�Ñ����ܕ�ϣ��ֱ���ڙC�����ϑ����Լ�����̖̎���㷨��
NAOqi���ʹ�á����Ό����L���f�h����Simple Object Access Protocol�����QSOAP�����l�ͺͽ��վW�j���l��̖��
ʹ��ALSA�죨Advanced Linux Sound Architecture����NAO�����ɺ�ӛ�����
ALAudioDeviceģ�K�������l��ݔ���ݔ����
���I�ˆT����NAO�����l̎�����������M�д����c�˙C���Ӽ���Ϣ�������P�Č����о���
���磬NAO������һ�������������Ñ����������ں���һ���˽�Մһ�ӣ��c�C���˻��ӣ��罻Մ���A �ȣ���
��̖̎����ȻҲ��һ���ܺõđ��Ì������Ñ��ɽ������lģ�K�����r�@�Á��������L��ԭʼ���l������Ȼ��ʹ���Լ��Ĵ��a����̎����
�|�X������
���z���^�������L�⣬NAO߀��������ʽ���������քeλ���^��c�ֲ���ÿ̎�Ă������֞������֡�
�ɴˣ����Ϳ���ͨ�^�|����NAO�l��ӍϢ�����磬����һ���|�������������V�C���������P�]������ʹ��ԓ���������|�lijһ���P������
ԓϵ�y�cLED������ʹ�ã���ָʾ�|����͡���߀���Á������s���С�
����
NAO����pͨ������ϵ�y�������ɂ��l�����̓ɂ���������
ͨ�^ԓϵ�y���C���˿ɹ�Ӌ�����c�܇��h���е��ϵK��֮�g�ľ��x��̽�y��������0��70����֮�g��
���c�ϵK��ľ��xС��15���וr���C���˲����@�þ��w�ľ��x��Ϣ����ֻ��֪��������һ�����w��
�B��
��̫�W�cWifi�o���B��
NAO֧��Wi-Fi�o���B�ӣ�a��b��g�˜ʣ�����̫�W�B�ӡ��@��Ŀǰʹ����V���ăɷN�W�j�B�ӷ�ʽ�����⣬NAO�۲�߀����˼t�⾀�l���c�����������B�����܇��h���е����w�ϡ�NAO�cIEE 802.11g Wi-Fi�˜ʼ��ݣ�������WPA��WEP�W�j����˿��^�������B������ͥ���k���ҾW�j�ϡ�NAO�IJ���ϵ�y֧����̫�W�cWi-Fi�o���B�ӣ���ˣ�����Ҫ�ڟo���B�ӕrݔ���ܴa�⣬�o���M�������κ��e���O�á�
NAO�ľW�j�B���������о������ṩ�˶�N�����ԡ�����ͨ�^�W���κ�һ�_��X������NAO����侎�̡�
����NAO�Ñ��_�l�����ɑ��Ì�����
• ����IP��ַ��NAO�ɴ_���䮔ǰ��λ�ã����_�������A��
• NAO���Ҹ����cijһ���}���P����Ϣ��NAO���Ԅ��B�����S���ٿƣ������x���P�~�l��
• ��NAO�B�������������l�����C���˕��D��ijһ�ھ���_�Ĺ�Ŀ��
�\��XMPP���g����ȸ�����ϵ�yʹ�õļ��g�����Ñ����h�̿���NAO�����@���əC���˵Ĕz���^���ص�ҕ�l����
�t�⾀���g
ͨ�^�t����̖����ͬ�ęC����NAO֮�g���������NAO߀���c����֧�ּt�⾀���g������ ���������磬�Ñ�����NAO�����������l�ͼt�⾀��̖���Կ����@Щ���������磺��NAO��Ո���_�ҕ�����������⣬NAOҲ�ɽ������b�����ȼt�⾀�l�� ���l����ָ��ɂ��C����NAO֮�g��ֱ�ӽ�����
�t�⾀���g���ѳɞ��ڼ�������ϏV��ʹ�õ�һ��b�ؼ��g����ˣ�NAOֻ�轛�^�m���{���������m���ڼ�ͥʹ�á����⣬NAO߀��̽�y���յ��ļt�⾀��̖��������ȣ�߀���҂ȡ�
�_Դ
��������ԁ���Aldebaran Robotics��˾һֱ�������_�l�C����ƽ�_��Ƕ��ʽϵ�y��ϣ���c�о����_�l�ˆT�Լ����c���˙C�������d�Ŀ���ˆT��ͬ������ƽ�_�������ߡ�����ͨ�Ŏ����������ģ�K��
NAO�Ñ��ɳ������Aldebaran Robotics��˾���S�����������������_�l���µđ��ó����ϡ�
���⣬������L��NAO��F�ԏ���Ą�����������ɫ��Ҳ�����Ñ�����˜\��
�C���˼������P���ó����Ԍ����d���о��I��
��Ҫ��ͬ̽��δ���đ��ó����б�Ҫ���҂����Ñ���^���c�����ɆT������ͨ�c������
|
|
| ���T���e�����M���T |
| ����r�g��2014-01-06
|
|

|